How to Choose the Right BLDC Motor for Your Application
Not sure which BLDC motor fits your design? This complete selection guide covers torque, speed, voltage, size, control method, and more — helping engineers make the right choice every time.
Selecting the wrong motor does not just stop the project. It also led to motor failure due to overheating, premature failures, and high loads, which led to engineering rework and involved time & cost. But these failures can be avoided by selecting the right BLDC motor.
As there are various variants of BLDC motors available with different frame sizes, voltage ratings, torque outputs, and control systems. Thus, selecting the right BLDC motor for the application can be overwhelming.
In this blog, we will break down the selection guide of the BLDC motors into clear and actionable steps. Whether you are designing an automation system, a drone, or medical devices, this guide will help you to understand the key requirements and specifications and help you select the right BLDC motor.
What Is a BLDC Motor and Why Does the Selection Matter?
A brushless DC motor is an electric motor powered by a DC supply and commutated electronically, rather than with brushes. This gives BLDC motors an edge over brushed DC motors and makes them highly efficient for various applications.
However, we can understand these requirements when the right variants of the BLDC motor match the application. A BLDC motor with low speed and high torque will not be used in drones, and vice versa. Therefore, selecting the right BLDC motor is the foundation of a reliable and efficient application.
Step 1: Define Your Load and Torque Requirements
Load and torque are the most important factors to think about when choosing the right BLDC motor. Before looking at any datasheet and specifications, one must answer the following questions:
- How much load does the motor need to move or hold?
- Will the load be constant or variable?
- Is the peak torque value different from the running torque?
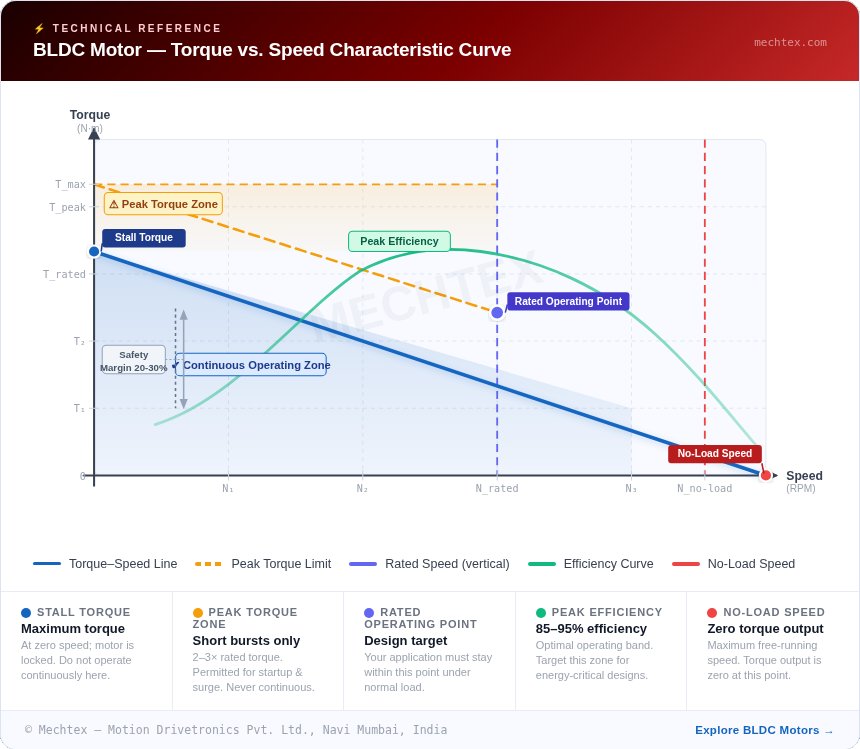
There are two types of torque we need to identify:
- Constant Torque
Also known as rated torque. It is the torque that the motor must sustain, without overheating.
- Peak Torque
It is a short-duration torque that is required for acceleration and handling the load. We must ensure that the selected BLDC motor's peak torque exceeds the application's demand.
Tip: Always add a 20–30% safety margin on top of your calculated torque requirement. This accounts for mechanical inefficiencies, friction, load variations, and aging.
Step 2: Determine the Required Speed (RPM)
BLDC motors offer various speed ranges, such as from 100 RPM to 100,000 RPM, for a wide range of applications. Before selecting BLDC motors, we must consider the following:
- Operating Speed
The continuous speed the application requires from the motor shaft.
- Speed Type
Does the application need variable speed or fixed speed?
- No-load vs full-load speed
We know that the motor's speed drops when it is under load. So, please select the BLDC motor whose rated speed matches the rated torque required by the application.
If an application needs low output speed and high torque, the best way to make it work most efficiently and reliably is to pair a high-speed BLDC motor with a gearbox.
Mechtex's planetary gearboxes and spur gearboxes are made to work perfectly with BLDC motors for this purpose.
Step 3: Match Voltage and Power Supply
Every system power supply is directly constrained by the type of motors we use. Before selecting the BLDC motor, we must consider the following questions:
- What DC voltage is available in your system (12V, 24V, 36V, or higher)
- Is the power source a battery, SMPS, or direct DC bus?
BLDC motors are available in a wide range of voltage ratings. BLDC motors with a high voltage rating offer high power output and are suitable for drones to offer better efficiency.
Formula to remember: Power (W) = Torque (Nm) × Speed (rad/s). Use this to cross-check whether the required mechanical power output is achievable within the supply voltage and current limits.
Step 4: Evaluate Motor Size and Form Factor
Physical constraints or factors are equally important as electrical ones. Motor design will dictate whether this motor is suitable for applications or not:
- Frame size/diameter
Standard NEMA or metric frame size must be considered to fit the motor into the application.
- Shaft dimensions
Shaft diameter and length must match the coupling or gearbox input.
- Mounting configuration
Flange mount, foot mount, or face mount to ensure the motor matches the mounting interface of the application.
Step 5: Sensored vs. Sensorless BLDC Motors — Which Do You Need?
One of the most overlooked decisions in BLDC motor selection is whether your application needs a sensored motor or a sensorless motor.
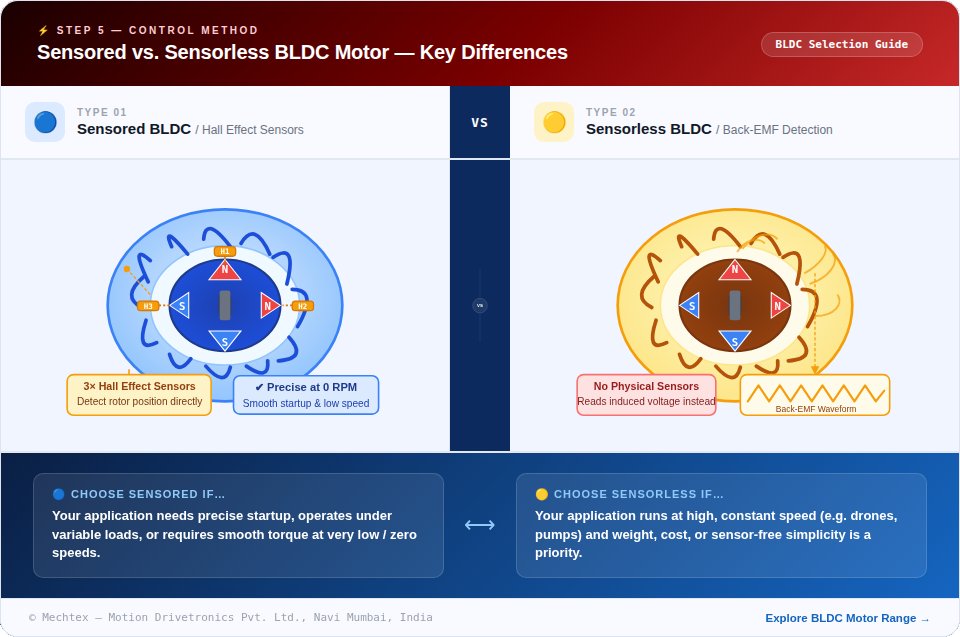
Sensored BLDC Motors
These BLDC motors use hall sensors for detecting the position of the rotor for smooth and efficient operation.
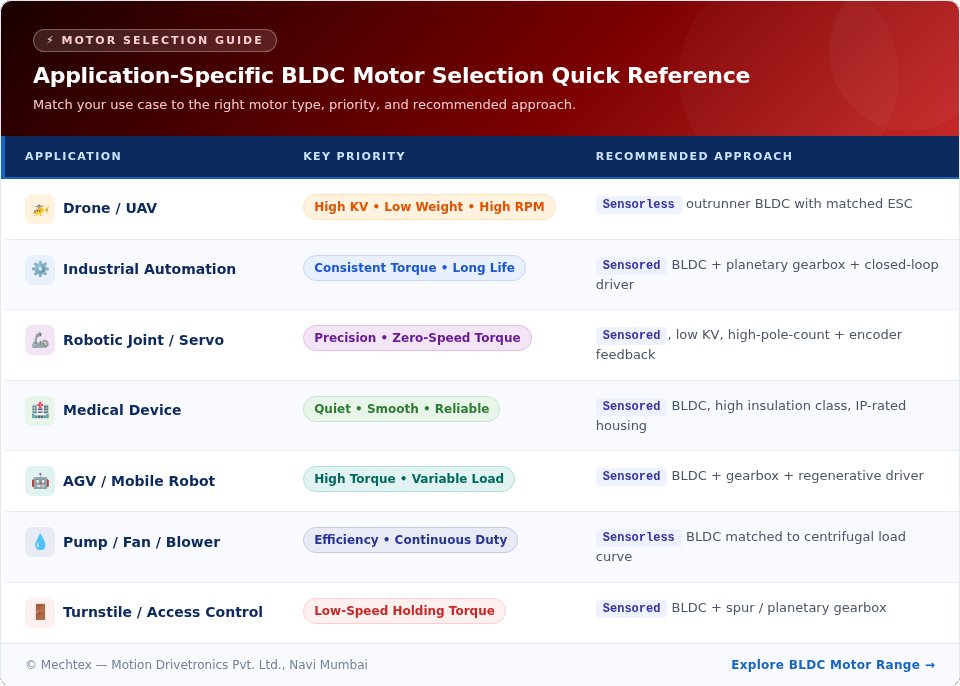
Best for:
- Robotics and servo applications
- Industrial Automation Application
- Electric vehicles and e-bikes
Sensorless BLDC Motors
These BLKDC motors use back-EMF to detect the position of the rotor. These motors are simple in design and cost-effective solutions.
Best for:
- Drones and multirotor UAVs
- Fans, pumps, and blowers
- High-speed spindle drives
If your application requires frequent starting, stopping, and reversing operations under varying loads, always prefer a sensored BLDC motor.
Step 6: Assess Driver and Control System Compatibility
A BLDC motor cannot run efficiently without a proper control system. A BLDC motor must be with its control system for smooth operations.
- Driver voltage and current rating
The driver voltage and current rating must be able to handle the motor's operating voltage and peak current draw.
- Control interface
The control interface must be able to use PWM, analogue voltage, RS-485, CANbus, or digital I/O.
- Closed-loop vs. open-loop control
For precision applications, closed-loop speed or position control requires encoder feedback. Ensure your motor and driver support encoder integration.
- Braking and regeneration
Make sure that your motor and driver can work with encoders. If your application requires quick deceleration (like robotics or conveyors), choose a driver that supports regenerative braking.
Mechtex offers a dedicated range of BLDC motor drivers engineered to pair with our motor lineup, eliminating the guesswork of driver-motor compatibility.
Common BLDC Motor Selection Mistakes to Avoid
Avoid These Common Mistakes When Choosing a BLDC Motor:
- Choosing a motor that is too close to its rated limit
Always leave a safety margin. A motor that runs close to its maximum rated torque or current all the time will not last as long.
- Not taking the gearbox into account in the system equation
Motor speed and torque are measured at the motor shaft, not the output shaft. When figuring out how well the system works, always take into account the gearbox ratio and efficiency.
- Mismatching the motor and driver
A high-performance motor won't work as well as it should if it's paired with a driver that isn't powerful enough or isn't compatible. Treat the motor and driver as a system.
- Overlooking the duty cycle
Many motors are rated for intermittent operation. Running an S2-rated motor under S1 (continuous) conditions is a common cause of field failures.
Conclusion
Picking the right BLDC motor isn't a one-time decision; it's a methodical process of matching the motor's specifications to the mechanical, electrical, environmental, and control needs of your application. The eight steps above give you a clear way to make that choice with confidence.
Mechtex makes a wide range of BLDC motors, from small, high-speed drone motors to strong industrial drives. We also make drivers, gearboxes, and encoders that work together as a system. Our engineering team is available to help you find the right fit, whether you're designing a new system or fixing an old one.
















