Stepper Motor Losing Steps at High Speed: Causes & Solutions
A stepper motor works by receiving an electrical signal and moving corresponding steps. Losing a step means that the stepper motor fails to follow the signals properly. It is not a random failure; it is a predictable result of electrical, mechanical, and control limitations.
Stepper motors are an important component of a motion control system. Their ability to move in discrete steps makes them ideal for applications that require accurate positioning, such as CNC machines, 3D printers, robotics, and industrial automation. One common challenge everyone faces with stepper motors is that they lose steps at high speeds.
This challenge can significantly affect the performance and lead to reduced efficiency and positioning errors. Understanding why stepper motors lose steps at high speed and the preventive measures for smooth operation.
What Does “Losing Steps” Mean?
A stepper motor works by receiving an electrical signal and moving corresponding steps. Losing a step means that the stepper motor fails to follow the signals properly. As a result, the stepper motor does not move to a particular angle.
Since the stepper motor operates in an open-loop system without any feedback system. It means the step loss is a challenge, which can be unnoticed, during the operation.
Causes of Stepper Motor Losing Steps at High Speed
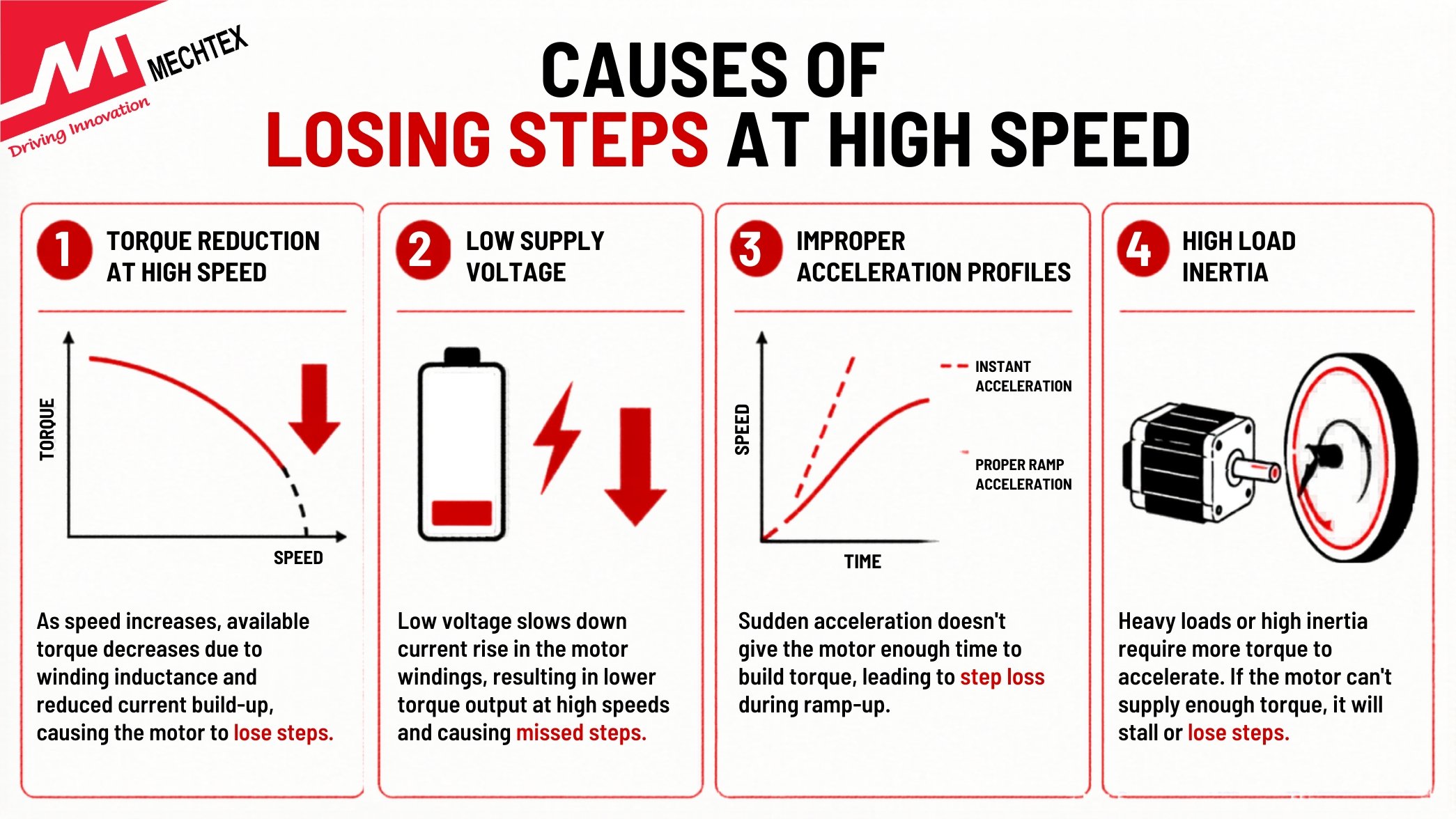
- Torque Reduction at High Speed
Inherently, stepper motors produce high torque at low speed. However, the torque decreases as speed increases. It is due to the inductive nature of winding, which limits current build-up.
At high speed, the current does not reach the peak value and before the next pulse arrives, this results in reduced torque.
- Low Supply Voltage
Voltage plays a significant role in determining how fast the current rises in motor windings. A low-voltage supply means the current supply is low at higher speeds.
This led to low torque at high speed, making the motor more prone to losing steps under load.
- Improper Acceleration
Sudden acceleration is the main cause of step loss. If a motor is required to jump from low speed to high speed, it may not generate enough torque to overcome inertia and step loss.
- High Load Inertia
Mechanical load plays an important role in the performance of the stepper motor. Systems with high inertia require a stepper motor with high torque to accelerate and decelerate.
If the stepper motor does not provide enough torque at high speed, it will not synchronise and lose steps.
Solutions to Prevent Step Loss

- Increase Supply Voltage
Use a high-voltage driver to improve the current rise time in the winding of the stepper motor. It helps to maintain torque at high speeds. Therefore, always ensure that the voltage stays within motor and driver limits.
- Optimise Load Conditions
Reducing load inertia from the system can improve motor performance significantly. In applications that require high torque, combine stepper motors with a gearbox to increase output torque with efficiency.
- Use Microstepping
Microstepping divides each full step into small steps, resulting in smooth and efficient operation. It does not increase torque at high speed, but improves stability and positioning accuracy.
- Tune Driver Settings
Carefully configure the driver settings, microstepping levels, and decay modes based on motor technical specifications. Proper configuration ensures the motor operates efficiently across different speeds.
Expert Insight
If your application consistently requires high-speed operation with varying loads, it may be worth evaluating servo motors. While stepper motors excel in cost-effective, low-speed precision applications, servo systems offer better performance in high-speed and dynamic environments.
Frequently Asked Questions (FAQs)
Q: My stepper motor loses steps only when the machine is cold, is this normal?
A: This is usually a lubrication issue. Grease in lead screws and linear rails thickens significantly at low temperatures, and increase holding torque. As the machine warms up, viscosity drops and the motor copes. Solutions include switching to a low-temperature grease or maintain the torque safety margin to accommodate cold start.
Q: Does microstepping prevent step loss?
A: Microstepping reduces resonance and improves smoothness, but it does not increase torque. In fact, torque at microstep decreases as the microstepping ratio increases. Microstepping alone will not fix step loss as it requires a higher voltage, a larger motor, or a gearbox.
Q: Can I detect step loss without adding an encoder?
A: Some advanced stepper drivers include stall detection via back-EMF monitoring (similar to sensorless BLDC control). This can identify a stall event but cannot measure how many steps were lost.. For true closed-loop correction, an encoder is required.
Q: My motor loses steps only on one axis; what does that indicate?
A: A single-axis problem almost always points to a mechanical cause such as binding, misalignment, worn lead screw or a driver-side issue such as current set too low, faulty driver channel specific to that axis. Begin with the mechanical rotation test and driver current verification before assuming a motor problem.
Q: What is the maximum reliable speed for a hybrid stepper motor?
A: This depends heavily on motor inductance, driver voltage, and load. As a rough guide, most NEMA 23 hybrid stepper motors with a 48V driver deliver usable torque up to 600–1,000 RPM. Beyond that, torque drops steeply and lead to step loss. Applications requiring sustained operation above 1,000 RPM should use BLDC motor as alternatives.
Conclusion
Stepper motor losing steps at high speed is not a random failure; it is a predictable result of electrical, mechanical, and control limitations.
Optimising voltage, acceleration, load handling, and driver configuration can eliminate most step loss issues. For demanding applications, advanced solutions like closed-loop systems provide an added layer of reliability.
Addressing these factors early in the design phase ensures smoother operation, higher accuracy, and long-term efficiency in your motion control systems.